It's true that being born early isn't as important as being born at the right time. As the world's first invented motor, the axial flux motor remained relatively unknown, finding applications only in elevators and certain agricultural machinery. However, the radial flux motor, the most common type of motor today, has been widely used across various industries. The schematic diagrams of the two types of motors are shown below:
.jpg)
However, in recent years, with the rise of industries such as electric vehicles, aerospace, robotics, and drones, the demand for high-efficiency, compact motors has been increasing, and the development of radial flux motors in this area seems to have reached a bottleneck. With advancements in motor materials and manufacturing processes, significant progress has been made, making the manufacture of axial flux motors less difficult, thus bringing them back into the spotlight.
Compared to traditional radial flux motors, the biggest difference in axial flux motors is that their magnetic flux direction is parallel to the motor shaft, rather than perpendicular to it. Therefore, the stator structure has also undergone significant changes. Using soft magnetic composite powder through mould pressing and heating treatment, we can get very complex stator and rotor structures. Becasue of isotropic characteristic and 3D magnetic flux, SMC cores can reduce e-machine size, weight obviously, meanwhile can improve the efficiency.
.jpg)
.jpg)
.jpg)
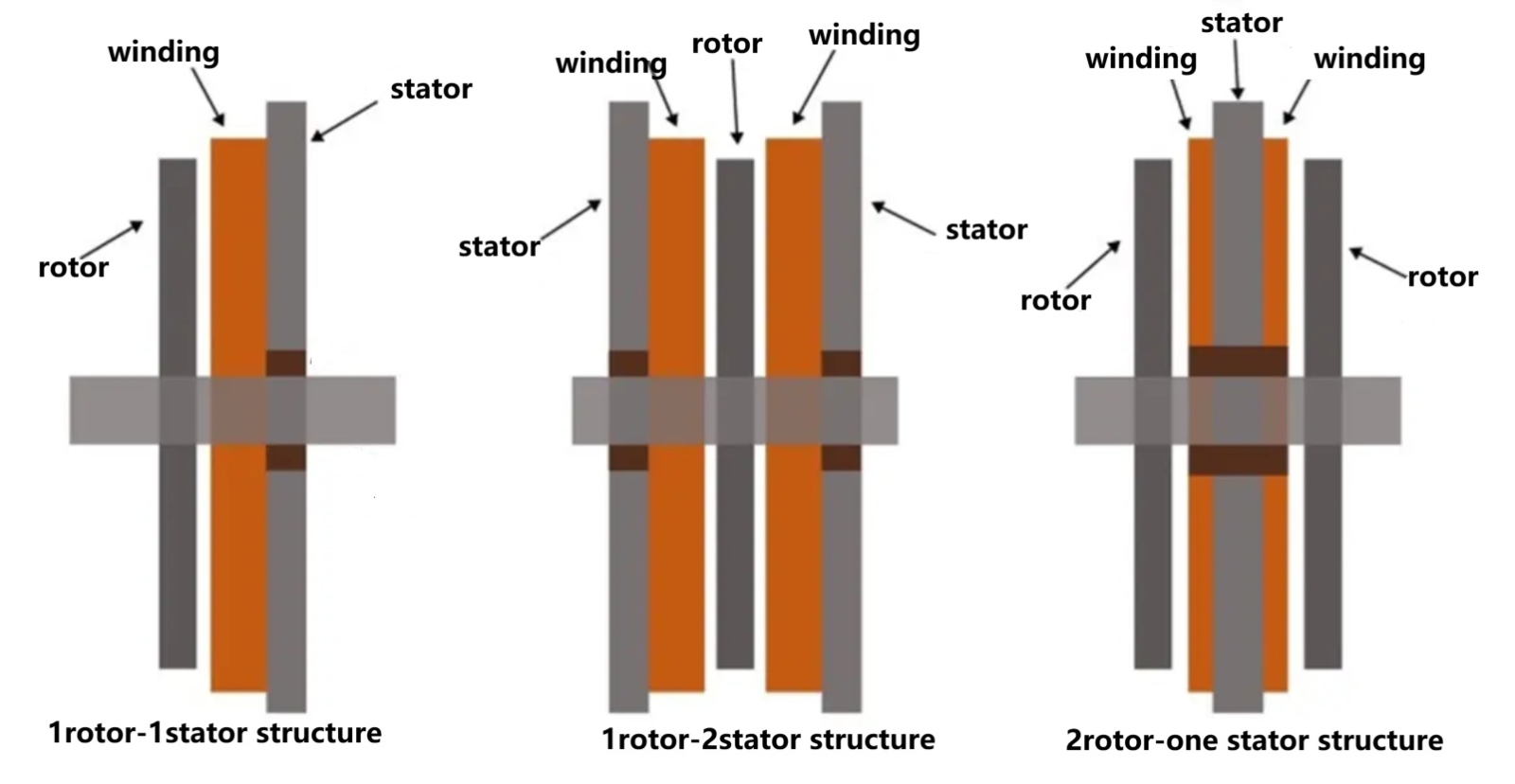
Currently, depending on the design, axial flux motors can have the following structural forms: single stator single rotor, double stator double rotor, and single stator double rotor, etc.
Compared to radial flux motors, axial flux motors offer the following advantages:
Due to their flat, disc-shaped structure, the stator and rotor can be arranged more compactly within a given volume. The flux path is shorter, and flux utilization is higher, resulting in higher power and torque density, making them suitable for high-power, space-constrained applications.
In radial motors, the flux path extends from one rotor pole to the first stator tooth, then through the stator yoke to the second tooth, and finally returns to the other rotor pole—a two-dimensional path. Axial flux motors, however, have a unidirectional, one-dimensional path, allowing the use of grain-oriented electrical steel with higher permeability to reduce iron losses and further improve efficiency.
Axial flux motors typically employ fractional-slot concentrated windings, while most radial flux motors use distributed windings. Concentrated windings have a discrete coil per stator tooth, making modularization and automation easier. Furthermore, fewer end windings reduce additional weight, cost, resistance, and heat loss compared to radial flux motors.

